
معضل نقطه کور اپراتورها:
بسیار در پروژه های ساختمانی پیش می آید که اپراتور تاورکرین ناچار باشد باری را در محدوده نقطه کور خود بردارد، جابجا نماید یا تخلیه کند. علت این مسئله، قرارگیری بخش هایی از ساختمان در حال ساخت در مقابل میدان دید اپراتور و یا الزام به جابجایی بار دقیقاً زیر کابین اپراتور می باشد. امروزه برای رفع نقطه کور اپراتور تاورکرین از سیستم های ویدئویی و سیستم های جلوگیری از برخورد استفاده می شود.
متاسفانه دوربین های موجود در بازار نمی توانند فواصل را دقیق تشخیص دهند یا ماهیت محیط اطراف جرثقیل را درک کنند. بنابراین در این مقاله به معرفی یک سیستم جدید هدایت اپراتور تاورکرین پرداخته شده است که با استفاده از سنسورهای مختلف و در محیط مدلسازی اطلاعات ساختمان (BIM) بطور پیوسته به شبیه سازی عملکرد جرثقیل بصورت سه بعدی می پردازد. آزمایش این سیستم در پروژه های واقعی نشان می دهد اپراتور ها در ۹۳% موارد از این سیستم استفاده می کنند که نشان دهنده میزان اتکای اپراتور بر این سیستم برای جابجایی بار در نقاط کور پروژه می باشد.

راهکارهای رفع نقطه کور:
فناوری های رفع نقطه کور اپراتور تاورکرین در واقع از تکنولوژی خودروهای بدون راننده الهام گرفته اند. هرچه ارتفاع ساختمان ها بیشتر می شود، نقاط کور اپراتور تاورکرین نیز افزایش می یابد و مسئله هدایت جرثقیل حادتر می گردد. به این دلیل، دوربین های ویژه ای روی بازوی جرثقیل ها قرار گرفتند که جابجایی بوم را از نمای بالا به اپراتور نشان می دهند. متاسفانه در پروژه های بلند مرتبه، این دوربین ها به قدری از زمین فاصله دارند که اپراتور قادر به دیدن دقیق محل برداشتن بار نخواهد بود. همچنین، این دوربین ها درک درستی از فاصله قلاب تا محل برداشت یا تخلیه بار ایجاد نمی کنند.
برای حل این مشکل تنها راه آن است که چندین دوربین دیگر در فواصل ارتفاعی هر ۲ یا ۳ طبقه از ساختمان تعبیه گردد که تعیین بهترین مکان برای این دوربین ها چندان هم ساده نیست. ضمن اینکه در پروژه های بلندمرتبه، هزینه تامین دوربین ها و ایجاد و نگهداری زیرساخت این تعداد دوربین هم به یک دغدغه تبدیل خواهد شد. باید دقت شود که شعاع دید دوربین های نصب شده روی سازه هم میتواند با ساخت دیوارها یا سقف های جدید مسدود گردد.
راهکار دیگر برای رفع نقطه کور اپراتور تاورکرین، استفاده از سیستم جلوگیری از برخورد (Anti Collision System) است. این سیستم ها معمولا مختصات و زوایای بوم و قلاب جرثقیل را بصورت عددی روی مانیتوری که در کابین اپراتور نصب شده است، نشان می دهند. این سیستم نیز قادر نیست اپراتور را از شرایط محیطی تاورکرین و موقعیت دقیق بار نسبت به ساختمان های در حال ساخت آگاه سازد.
در این مقاله به معرفی یک سیستم جدید هدایت اپراتور تاورکرین پرداخته می شود که در قالب مدلسازی اطلاعات ساختمان (BIM) و بصورت لحظه ای به ارائه وضعیت تاورکرین، بار و ساختمان های اطراف آن در یک محیط سه بعدی می پردازد. این سیستم از انواع سنسورهای چرخش تاور، زاویه بوم، طول کابل، سنسور لیزری تشخیص فاصله و یک دوربین بی سیم استفاده می کند.
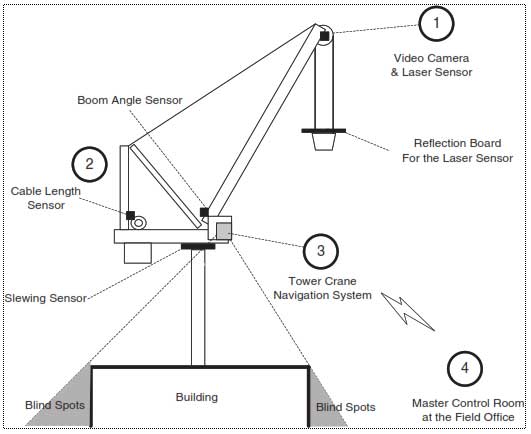
سیستم جدید هدایت اپراتور:
این سیستم رفع نقطه کور اپراتور تاورکرین در طی برنامه صنعتی سازی ساختمان با استفاده از جرثقیل های رباتیک تولید شده که توسط وزارت مسکن کره جنوبی راه اندازی شده است. در این سیستم، اطلاعات بدست آمده توسط سنسورها پس از تطابق با مدل BIM ساختمان، هم برای هدایت اپراتور در کابین تاورکرین به نمایش در می آید و هم به یک اتاق کنترل مرکزی ارسال می شود. اتاق کنترل مرکزی وظیفه دارد در صورت بروز حوادث خاص، کل سیستم تاورکرین را متوقف نماید.
براساس مدل پذیرش تکنولوژی های جدید (TAM) تولید فناوری رفع نقطه کور اپراتور تاورکرین برای استفاده در صنعت ساختمان کافی نبوده و باید این فناوری مورد استقبال کاربران قرار گیرد. میزان استقبال کاربران براساس دو مولفه “سهولت استفاده” و “مفید بودن” مورد ارزیابی قرار می گیرد. به این منظور، فناوری پیشنهادی به مدت ۷۱ روز در یک پروژه ۷ طبقه توسط ۳ تاورکرین مورد آزمایش قرار گرفت.
از نظر سهولت استفاده، با نظر کاربران مقرر شد از مانیتورهای صفحه لمسی استفاده نشود، چرا که درگیری دست اپراتور با اهرم های کنترلی تاور، استفاده از صفحه لمسی را سخت می کند. همچنین اپراتورها ترجیح می دهند به جای مدل ۳ بعدی از مدل ۲ بعدی استفاده کنند، چرا که درک سریع مدل ۲ بعدی برای آن ها آسان تر است. علیرغم نمایش گرافیکی موقعیت تاور، ساختمان های اطراف و بار در حال حمل، اپراتورها ترجیح می دهند فواصل و زوایای برآورد شده را بصورت جدول عددی هم روی مانیتور داشته باشند.
بهترین سایز مانیتور برای استفاده بهینه در کابین تاور، حدود ۱۳ اینچ برآورد شده و بهترین محل قرارگیری آن در کنار اهرم های کنترلی و مقابل صندلی اپراتور می باشد. اینکه مانیتور در سمت چپ یا راست اپراتور قرار بگیرد، تاثیر چندانی بر عملکرد اپراتور ندارد. مانیتور باید به سه بخش تقسیم شود که نما از بالا، نما از کنار و تصویر ویدئویی تاورکرین را نمایش می دهند. نمای کناری حتماً باید حین چرخش تاورکرین، به جای چرخاندن واقعی تاور به نمایش چرخیدن محیط و ساختمان های حول تاور بپردازد. در غیر اینصورت مشاهده شده است که اپراتور در مورد میزان چرخش تاور گیج می شود.

برای ارزیابی میزان مفید بودن سیستم رفع نقطه کور اپراتور تاورکرین، یک ویدئو در کابین جرثقیل ها نصب شد تا میزان نگاه کردن اپراتورها به مانیتور در زمان جابجایی بار توسط تاورکرین مشخص شود. مشاهدات نشان می دهد اپراتور ها در ۹۳% موارد از این سیستم استفاده می کنند، درحالیکه نرخ استفاده از تصاویر دوربین ویدئویی حدود ۵۳% و نرخ استفاده سیستم های قدیمی جلوگیری از برخورد کمتر از ۷% بوده است.
مقاله مرجع:
مطالب مرتبط
اقدامات تجهیز کارگاه در پروژه
اهمیت تجهیز کارگاه: برای اجرای پروژه های ساختمانی به تاسیسات، تجهیزات و ماشین آلات متعددی[...]
ادامه
ضایعات مصالح در پروژه های ساختمانی
ضایعات ساختمانی و محیط زیست: صنعت ساختمان به عنوان بزرگترین مصرف کننده منابع طبیعی در[...]
ادامه
راهکارهای کاهش اتلاف مصالح ساختمانی
راهکارهای کاهش اتلاف مصالح ساختمانی:طراحی طراحی تجهیز کارگاه به منظور افزایش راندمان مصرف مصالح. طراحی[...]
ادامه
تجهیز کارگاه ساختمانی در مگا پروژه ها
اهمیت تجهیز کارگاه در پروژه های بزرگ: گروه ایمن سازان پای، مقالات متعددی در زمینه[...]
ادامه
مدیریت پسماند در پروژه های ساختمانی
مدیریت پسماند در پروژه های ساختمانی: مدیریت پسماند در پروژه های ساختمانی به فرایندی اتلاق[...]
ادامه
خواص سنگدانه های بتنی بازیافتی
کاربرد مصالح بازیافتی ساختمان: مصالح حاصل از تخریب ساختمان های فرسوده، سهم زیادی از ضایعات[...]
ادامه
روش صحیح تخریب ساختمان
استفاده مجدد از ضایعات ساختمانی: در این مقاله به روش صحیح تخریب ساختمان به منظور[...]
ادامه
کاهش اتلاف مصالح در کارگاه های ساختمانی
اهمیت کاهش ضایعات ساختمانی: تحقیقات نشان می دهد که تا ۵۰ درصد از منابع طبیعی[...]
ادامه
اتلاف مصالح و ضایعات ساختمانی
آمار جهانی از ضایعات در صنعت ساختمان: کارهای ساختمانی همچون تخریب یا نوسازی ساختمان های[...]
ادامه