
استفاده از الگوهای حرکتی در بهینه سازی کارگاه

این مقاله چارچوب جدیدی برای استفاده از داده های مکانی به منظور آگاه سازی مدیران کارگاهی و کارشناسان ایمنی و همچنین هدایت ربات های کارگاهی طبق الگوهای حرکتی کارگران ساختمانی ارائه می نماید. اطلاعات مربوط به مکان قرارگیری، جهت حرکت و سرعت حرکت منابعی از قبیل نیروی انسانی، ماشین آلات و مصالح ساختمانی مصرفی در کارگاه درصورتیکه بطور دقیق و به موقع تهیه شوند به شناسایی الگوهای حرکتی در کارگاه منجر خواهند شد. این اطلاعات می بایست در میان ذینفعان مختلف پروژه منتشر شده و عملکرد آن ها را در مهیا نمودن ملزومات ایمنی پروژه بهبود بخشند.
علاوه بر موارد فوق، تحلیل جامع الگوهای حرکتی در کارگاه های ساختمانی به جانمایی و تخصیص صحیح منابع کمک می نماید و در نتیجه کارایی و ایمنی پروژه را افزایش می دهد. رهگیری و تحلیل مسیرهای جابجایی منابع در کارگاه، کاربردهای متنوعی دارد و مواردی از قبیل کنترل زمان مصرفی بهینه برای جابجایی ماشین آلات و کاهش هزینه های حمل مصالح در کارگاه و اخطار مناطق پر خطر برای بهبود ایمنی پروژه را شامل می شود.

فناوری هدایت سیستم های رباتیک در کارگاه های ساختمانی
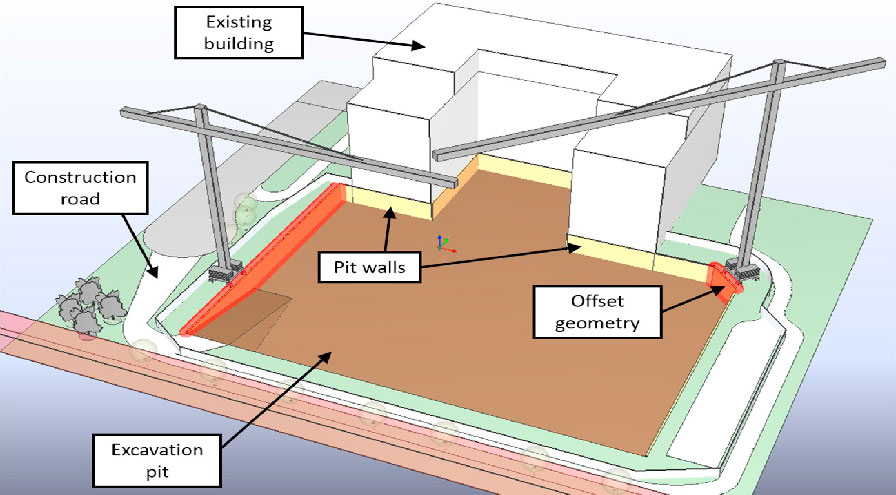
در این مقاله با استفاده از فناوری Ultra Wide band و سنسورهایی که در کلاه ایمنی کارگران تعبیه شده است، مسیرهای حرکتی کارگران در سطح کارگاه شناسایی می شود. براساس رفتار غریزی انسان در طی نمودن کوتاه ترین، ساده ترین و کم خطر ترین مسیر، فرض می شود که مسیرهایی که بیشترین میزان تردد در آن ها ثبت شده است، بهترین مسیرهای تردد در سطح کارگاه را تشکیل دهند. همچنین فرض می شود قسمت هایی که هیچگونه حرکتی در آن ها ثبت نشده است، موانعی باشند که در مسیر حرکت افراد قرار دارند. به این صورت با تحلیل الگوهای حرکتی در کارگران، مسیرهای مناسب برای تردد ماشین آلات و جابجایی مصالح در کارگاه شناسایی می شود.
این سیستم مسیریابی برای هدایت ربات های کارگاهی طبق الگوهای حرکتی کارگران ساختمانی کارایی خواهد داشت. ادامه مسیر این پژوهش به شناسایی الگوهای کاری علاوه بر الگوهای حرکتی در کارگاه های ساختمانی خواهد انجامید.
مقاله مرجع
مطالب مرتبط
طراحی تجهیز کارگاه با مدلسازی اطلاعات ساختمان
طراحی تجهیز کارگاه با مدلسازی اطلاعات ساختمان: در این مقاله به تشریح مبانی عملکرد نرم[...]
ادامه
بازیافت نخاله های ساختمانی در دپو پسماند
بازیافت نخاله های ساختمانی در دپو پسماند: در این مقاله به بررسی مزایای بازیافت نخاله[...]
ادامه
ارزیابی اقتصادی کارخانه بازیافت پسماند ساختمانی
ارزیابی اقتصادی کارخانه بازیافت پسماند ساختمانی: ضایعات ساختمانی به عنوان یکی از عوامل تهدید محیط[...]
ادامه
استفاده از ضایعات بتنی در راهسازی
کاربرد ضایعات بتنی حاصل از تخریب ساختمان: استفاده از ضایعات بتنی در راهسازی بجای دپو[...]
ادامه
مشخصات فنی بتن با مصالح بازیافتی
بتن با سنگدانه بازیافتی: ضایعات بتنی یکی از مصالح اصلی تولید شده از تخریب ساختمان[...]
ادامه
LOD در مدلسازی اطلاعات ساختمان (BIM)
مدل BIM برای چه کسی تهیه می شود؟ مدلسازی اطلاعات ساختمان (BIM) با ظهور مفاهیمی[...]
ادامه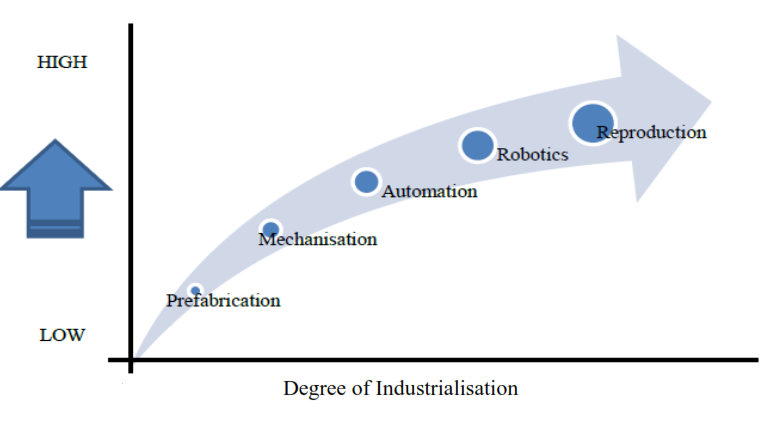
صنعتی سازی ساختمان
ساختمان سازی در انقلاب صنعتی چهارم: صنعت ساختمان نیازمند سازمان های کارآمدتر، فرایندهای موثرتر و[...]
ادامه
جداساز لرزه ای
جداساز لرزه ای چیست؟ در این مقاله توضیح می دهیم که جداساز لرزه ای (Seismic[...]
ادامه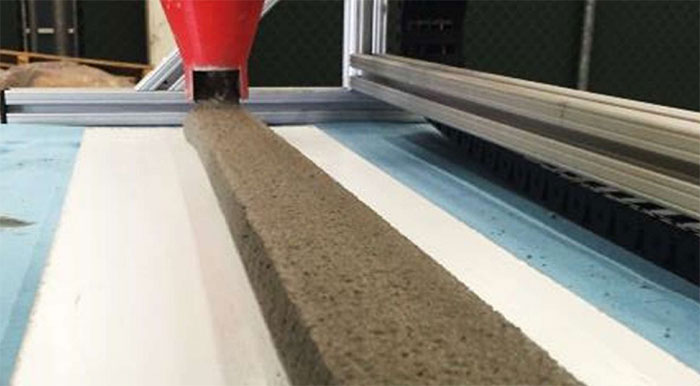
چالش های پرینت سه بعدی ساختمان
پرینت سه بعدی به معنای چاپ لایه لایه یک محصول در فضای سه بعدی است.[...]
ادامه