
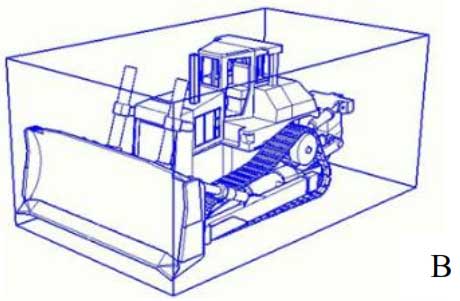
سدها، پل ها، جاده ها، کارخانجات صنعتی و بسیاری از پروژه های عظیم ساختمانی با اتکا بر توان عملیاتی ماشین آلات سنگین ساخته می شوند.
در کارگاه های ساختمانی، جابجایی ماشین آلات سنگین در کوتاهترین زمان و با کمترین مسیر طی شده از اهمیت زیادی برخوردار می باشد. به این منظور لازم است تا کوتاهترین مسیر میان نقاط شروع حرکت ماشین آلات و مقصد آن ها به دقت شناسایی شود. این مسیر می بایست علاوه بر کوتاه بودن، ایمن باشد و احتمال بروز تصادف را تا حد امکان کاهش دهد.


در روش فعلی جابجایی ماشین آلات ساختمان (حتی به صورت رباتیک)، تعیین مسیر حرکت ماشین آلات بصورت دستی و با سعی و خطاهای فراوان و همچنین با صرف زمانی طولانی انجام می پذیرد. چرا که این عملیات توسط مدل فکری، میزان تجربه و سطح تخصص مهندسان هدایت کننده ماشین آلات محدود می شود.
این خطاها در کنار آمار بالای حوادث منجر به جراحت و مرگ در پروژه های ساختمانی که ناشی از تصادف با ماشین آلات سنگین رخ داده اند، بیانگر لزوم استفاده از یک سیستم هوشمند و دقیق هدایت و کنترل برای چنین ماشین آلاتی می باشد.
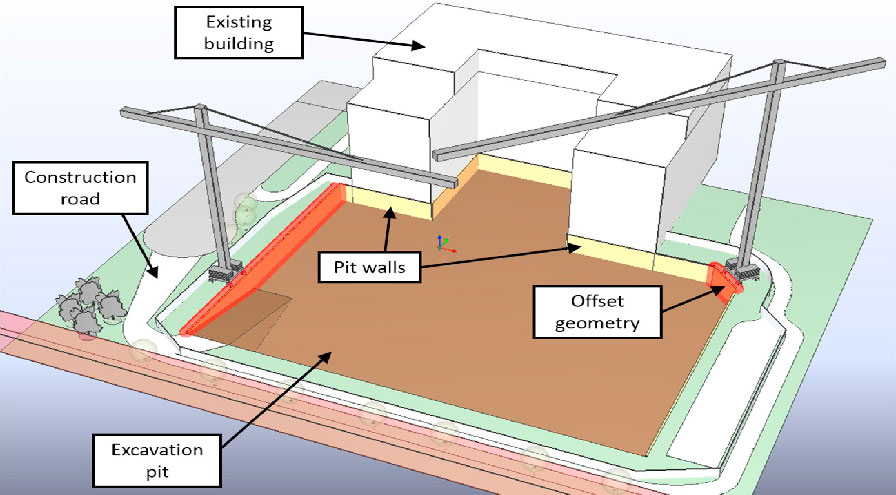
این سیستم هوشمند می بایست بر مبنای شناسایی یک مسیر بهینه ایمن در کارگاه شکل گیرد که هم از نقاط تداخل فعالیت های مختلف ساختمانی فاصله داشته باشد و هم با توجه به محدودیت فضای پروژه راندمان کارکرد ماشین آلات را بهبود بخشد.
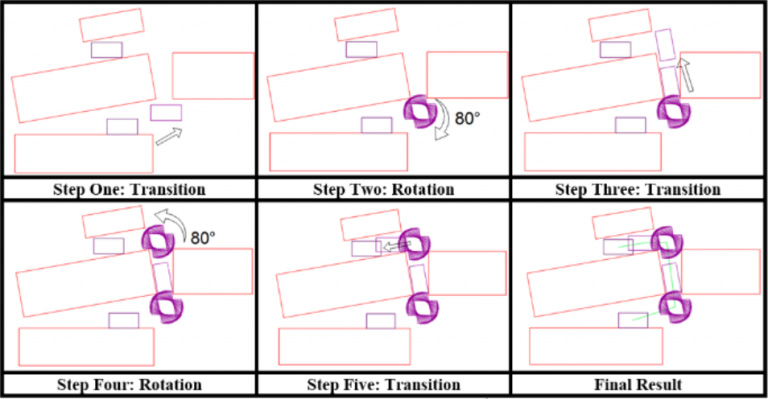
این سیستم هوشمند بر مبنای ساخت یک گراف از مجموعه نقاط قابل تردد در کارگاه و حذف زون های با چگالی زیاد موانع موجود در مسیر با استفاده از روش های ریاضی و محاسباتی فراابتکاری از جمله الگوریتم ژنتیک و الگوریتم مورچگان کار می کند.
سیستم هوشمند شناسایی مسیر با دریافت مشخصات هندسی سایت کارگاهی، مشخصات هندسی موانع موجود در کارگاه، مشخصات ماشین آلات مورد استفاده در پروژه و نقاط مبدا و مقصد فعالیت ها به آنالیز زون های مختلف و ایجاد گراف مسیرهای محتمل و انتخاب بهترین مسیر برای ترد ماشین آلات سنگین می پردازد.
مقاله مرجع

مطالب مرتبط
طراحی تجهیز کارگاه با مدلسازی اطلاعات ساختمان
طراحی تجهیز کارگاه با مدلسازی اطلاعات ساختمان: در این مقاله به تشریح مبانی عملکرد نرم[...]
ادامه
بازیافت نخاله های ساختمانی در دپو پسماند
بازیافت نخاله های ساختمانی در دپو پسماند: در این مقاله به بررسی مزایای بازیافت نخاله[...]
ادامه
ارزیابی اقتصادی کارخانه بازیافت پسماند ساختمانی
ارزیابی اقتصادی کارخانه بازیافت پسماند ساختمانی: ضایعات ساختمانی به عنوان یکی از عوامل تهدید محیط[...]
ادامه
استفاده از ضایعات بتنی در راهسازی
کاربرد ضایعات بتنی حاصل از تخریب ساختمان: استفاده از ضایعات بتنی در راهسازی بجای دپو[...]
ادامه
مشخصات فنی بتن با مصالح بازیافتی
بتن با سنگدانه بازیافتی: ضایعات بتنی یکی از مصالح اصلی تولید شده از تخریب ساختمان[...]
ادامه
LOD در مدلسازی اطلاعات ساختمان (BIM)
مدل BIM برای چه کسی تهیه می شود؟ مدلسازی اطلاعات ساختمان (BIM) با ظهور مفاهیمی[...]
ادامه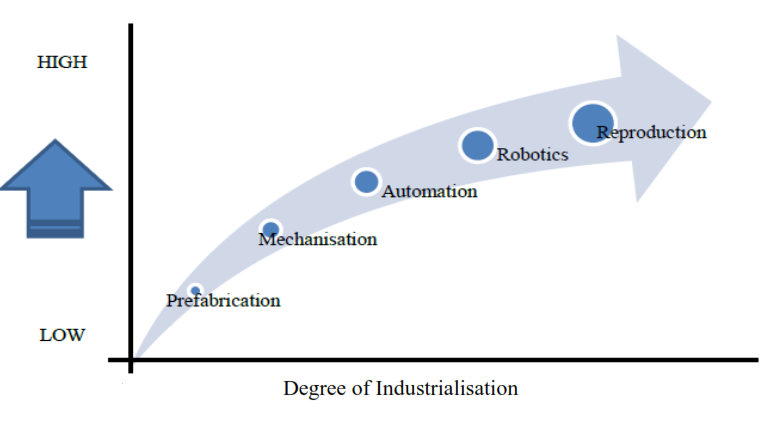
صنعتی سازی ساختمان
ساختمان سازی در انقلاب صنعتی چهارم: صنعت ساختمان نیازمند سازمان های کارآمدتر، فرایندهای موثرتر و[...]
ادامه
جداساز لرزه ای
جداساز لرزه ای چیست؟ در این مقاله توضیح می دهیم که جداساز لرزه ای (Seismic[...]
ادامه
چالش های پرینت سه بعدی ساختمان
پرینت سه بعدی به معنای چاپ لایه لایه یک محصول در فضای سه بعدی است.[...]
ادامه