
کنترل عملکرد تاورکرین:
امروزه بسیاری از پروژه های عظیم ساختمانی بصورت قطعات پیش ساخته ای اجرا می شوند که در کارخانه ساخته شده و پس از حمل، در محل کارگاه مونتاژ می شوند. این روش ساخت سبب افزایش راندمان کار و تسریع در زمان تحویل پروژه می گردد. یکی از پایه های اصلی این روش، استفاده اصولی و بهینه از تاورکرین می باشد.
برنامه ریزی اشتباه نحوه به کار گیری تاورکرین می تواند به افزایش هزینه های حمل و نصب و تاخیر در انجام کار منجر گردد. با این حال هنوز در بسیاری از پروژه ها، این برنامه ریزی بصورت شخصی و به نوعی غیر رسمی انجام می شود و مهندسان اجرا براساس مشخصات قطعات و جبهه های کاری به تعیین مسیر حمل، محل تخلیه، ملزومات نصب قطعات، جانمایی جرثقیل، تعیین طول بازوی مورد نیاز و ظرفیت حمل بار می پردازند که تمام فرایند آن بر پایه تجربیات این مهندسان صورت می پذیرد. درحالیکه چنین برنامه ریزی پیچیده ای با استفاده از فناوری رایانه و محاسبات دقیق به مراتب ساده تر، سریعتر و بهینه تر انجام می شود.
تحقیقات انجام شده برای بهینه نمودن کارکرد تاورکرین ها در ابعاد مختلف عملکرد این ماشین آلات به انجام رسیده است که از آن جمله می توان به تعیین جرثقیل مناسب با توجه به نوع کار، جانمایی مناسب برای دسترسی به حداکثر جبهه های کاری، استفاده از دوربین برای افزایش دامنه دید اپراتور، ثبت اطلاعات جابجایی بوم جرثقیل با استفاده از جی پی اس و یا امواج رادیویی، سیستم اخطار عبور بار از روی سر کارکنان با استفاده از فناوری لیزر و مدلسازی تونل باد برای کارگاه های واقع در مناطق بادخیز اشاره نمود.
تاورکرین های رباتیک:
از سوی دیگر، بخش قابل توجهی از دانش فنی در این زمینه به انتقال علوم رباتیک به حوزه ساختمان اختصاص یافته است. تاورکرین در آینده نزدیک به عنوان یک ربات به کار در کارگاه های ساختمانی خواهد پرداخت که نیاز به دخالت انسان را به حداقل می رساند. برای نیل به این هدف، پژوهش ها به جای تمرکز بر کنترل عملکرد (همانند مواردی که در بخش قبل به آن اشاره شد) به سوی توسعه سیستم های عامل متمایل شده اند.
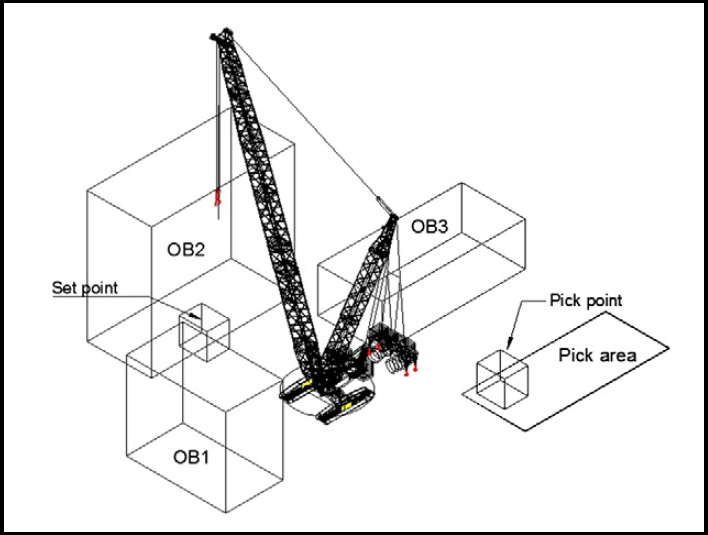
به این مظور لازم است نحوه کارکرد تاورکرین (مثلا محل برداشتن بار، مسیرهای مجاز و محل تخلیه آن) از پیش برنامه ریزی شود و به عنوان ورودی در اختیار دستگاه قرار گیرد تا تمامی عملیات حمل به گونه ای به انجام برسد که هم مسیر و زمان جابجایی و هزینه های عملیاتی بهینه باشد و هم احتمال تداخل کار و بروز حادثه به حداقل برسد.
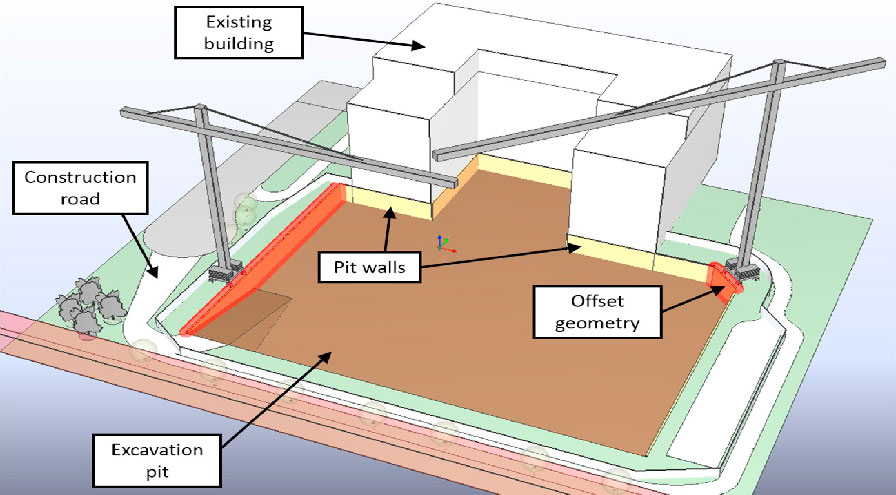
برای برنامه ریزی حمل مصالح و قطعات سنگین در کارگاه باید از ترکیب دو فناوری جدید استفاده نمود که یکی مدلسازی اطلاعات ساختمان (BIM) و دیگری هدایت ربات ها با استفاده از سنسورهای مختلف می باشد. استفاده همزمان از این دو فناوری به عنوان جایگزینی برای اپراتور جرثقیل، اولین بار در سال ۲۰۱۲ در کشور کره جنوبی در یک کارگاه ساختمانی و به مدت ۷۱ روز سبب بروز انقلابی در صنعت ساختمان گردید.

در برنامه ریزی حمل مصالح لازم است به حداقل و حداکثر ظرفیت بار و طول بوم جرثقیل، مشخصات فیزیکی قطعات، محدودیت فضای کارگاه، برنامه تخلیه بار در کارگاه، برنامه زمان بندی پروژه برای نصب قطعات، مشخصات محل برداشتن بار، مسیر ایمن حمل بار و محل استقرار یا نصب آن و طرح کلی تجهیز کارگاه توجه شود.
مقاله مرجع:
مطالب مرتبط
طراحی تجهیز کارگاه با مدلسازی اطلاعات ساختمان
طراحی تجهیز کارگاه با مدلسازی اطلاعات ساختمان: در این مقاله به تشریح مبانی عملکرد نرم[...]
ادامه
بازیافت نخاله های ساختمانی در دپو پسماند
بازیافت نخاله های ساختمانی در دپو پسماند: در این مقاله به بررسی مزایای بازیافت نخاله[...]
ادامه
ارزیابی اقتصادی کارخانه بازیافت پسماند ساختمانی
ارزیابی اقتصادی کارخانه بازیافت پسماند ساختمانی: ضایعات ساختمانی به عنوان یکی از عوامل تهدید محیط[...]
ادامه
استفاده از ضایعات بتنی در راهسازی
کاربرد ضایعات بتنی حاصل از تخریب ساختمان: استفاده از ضایعات بتنی در راهسازی بجای دپو[...]
ادامه
مشخصات فنی بتن با مصالح بازیافتی
بتن با سنگدانه بازیافتی: ضایعات بتنی یکی از مصالح اصلی تولید شده از تخریب ساختمان[...]
ادامه
LOD در مدلسازی اطلاعات ساختمان (BIM)
مدل BIM برای چه کسی تهیه می شود؟ مدلسازی اطلاعات ساختمان (BIM) با ظهور مفاهیمی[...]
ادامه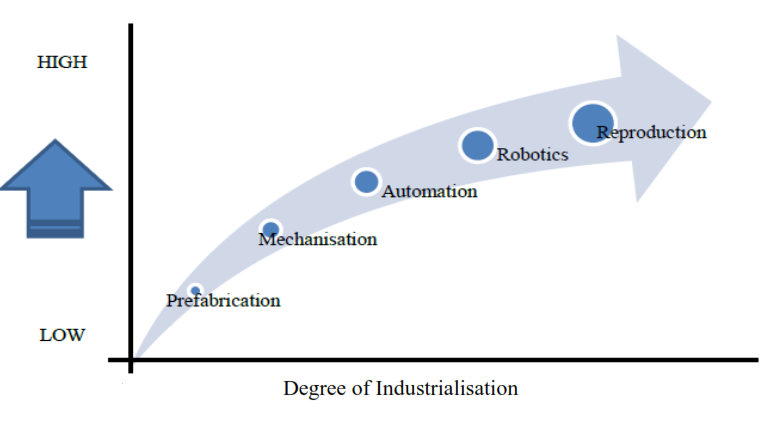
صنعتی سازی ساختمان
ساختمان سازی در انقلاب صنعتی چهارم: صنعت ساختمان نیازمند سازمان های کارآمدتر، فرایندهای موثرتر و[...]
ادامه
جداساز لرزه ای
جداساز لرزه ای چیست؟ در این مقاله توضیح می دهیم که جداساز لرزه ای (Seismic[...]
ادامه
چالش های پرینت سه بعدی ساختمان
پرینت سه بعدی به معنای چاپ لایه لایه یک محصول در فضای سه بعدی است.[...]
ادامه